 产品中心
产品中心



东营奇妙的abaqus hinge 连接器单元(二)
时间:2025-06-05 10:19:25
在(一)里讨论了一些hinge的奇怪之处,只是简单的调换了一些方向,就出现截然不同的运动模式:
这些现象可以解释吗?
能在定义hinge的时候,就对它的运动模式了然于胸吗?应该是可以的。下面的解释是本文作者根据资料和自己的理解给出,如有谬误和差错之处,哪位大神看到,请不吝赐教。
hinge连接器单元实际上是两种简单连接器的复合:join连接器以及revolute连接器。
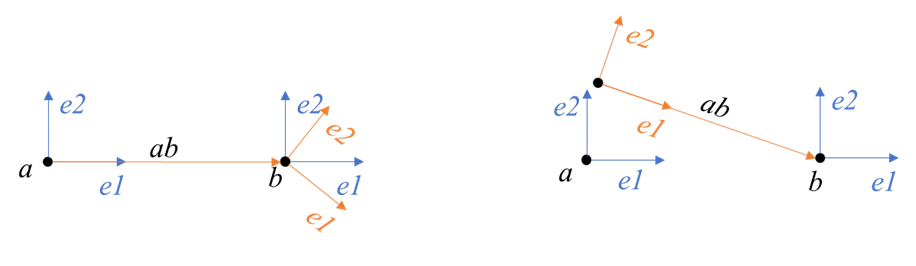
Join 连接器约束了两点之间的相对位置关系,revolute连接器约束了两点之间的旋转关系,两者结合就是hinge——只存在一个方向的相对转动,其他五个相对自由度均被约束的运动关系。在abaqus中,定义基础连接器join和revolute的结合(下图左),与直接定义hinge(下图右),效果是一毛一样的。
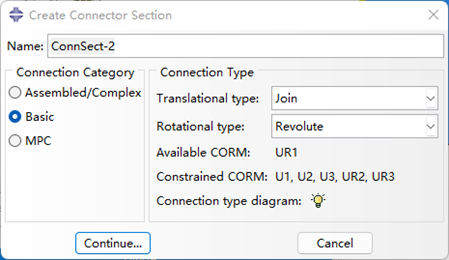
join+revolute
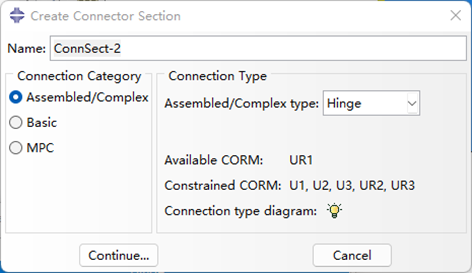
hinge
分别了解revolute 和join,就能了解hinge的约束机制。
REVOLUTE 连接器等效实体与约束原理图如上,它约束两个节点(a\b)之间的两个相对旋转,并允许一个自由旋转。 REVOLUTE 连接施加的两个运动约束是:
且
两个约束等效为一个,即a点的1轴和b点的1轴平行。
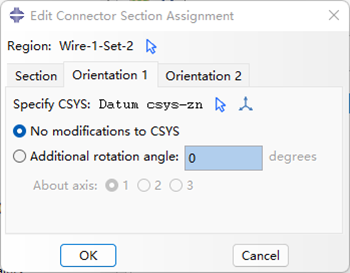
定义revolute时,需要定义两个点a、b,以及两点上的局部坐标轴,在CAE界面,orientation 1代表a点坐标轴,orientation 2代表b点坐标轴,通常会定义b点与a点初始坐标轴一致,此时初始角度为0。
重点是,a、b点不是绝对对等的,abaqus默认a点为连接器左端点,b点是连接器的右端点。左端点坐标轴1沿轴向指向端面内部,右端点b坐标轴1沿轴向指向端面外部。连接器上扭矩(或者扭转位移)的正负符合经典力学中对扭矩正负的定义——在端面上满足右手定则指向端面外侧为正,如下图:

因此,在定义了a、b和两个局部坐标时,就等于间接定义了力矩的正方向:在a点,扭矩满足右手定则并背离1轴正方向为正,在b点,扭矩满足右手定则并指向1轴正方向为正。
两点a、b就是定义线特征的point1、2。由于a、b点并不完全等同,于是point1和2就不能任意互换,线特征就有了方向。
无论是转换a、b点,还是转换局部坐标轴的方向,都会使得扭矩的正方向发生变化,就有了一开始案例的现象。

Join 连接器同样有点a、b,abaqus规定:约束点b 的位置等于点 a 的位置,如果两个节点最初不重合,则点 b 相对于点 a 的笛卡尔坐标是固定的。
重点:在a、b不重合的情况下,b点在a的局部坐标系中的位置是固定的。
因此,当固定a点转动b点时,b点的旋转只会带动自身的局部坐标系转动,不影响其在a坐标系中的位置,b只会自转,相反的,如果固定b点转动a点,a的坐标系也会随自身旋转,为了保证b的坐标固定,a只好绕着b开始公转。
表现在hinge连接器上,就是本文第二个案例的运动区别。
总结:
1、 hinge转动方向与点的顺序和坐标轴方向定义有关,坐标轴方向简单说,就是a点运动背离转动轴正方向为正,b点运动指向转动轴正方向为正。
2、 b点转动为自转,a点转动为公转,可以近似认为,hinge转动轴穿过b点并与局部坐标1轴平行,当a点、b点之间的线特征与局部坐标轴1轴方向一致时,线特征即可认为是转动轴,当线特征与1轴方向不一致时,可以认为a点与线特征为一整体绕通过b点的转轴转动。
如果觉得有点麻烦,拿复联这幅动图小小编个顺口溜,供大家记忆:

a是洛基b是绿(假设洛基为a点绿巨人为b点)
老绿稳稳站原地(b点同时也是旋转轴)
右手挥起小洛基(b点用右手定则为准,a反之)
一圈一圈真得意(这句是凑数的,忽略)
参考资料:abaqus官方帮助文档:>>>>>
